Learning Signed Distance Functions from Noisy 3D Point Clouds via Noise to Noise Mapping
Baorui Ma, Yu-Shen Liu, Zhizhong Han
ICML 2023 Oral
Tsinghua University
Wayne State University

Overview

corrupted observations of an uncorrupted 3D shape or scene - Learn SDF
of from without ground truth signed distances, point normals, or clean point clouds - For a query location
around , train a neural network parameterized by to learn
- For a query location
Find the uncorrupted point cloud
- For 2D images, multiple corrupted observations have the pixel correspondence. This results in an assumption that all noisy observations at the same pixel location are ran- dom realizations of a distribution around a clean pixel value. However, this assumption is invalid for point clouds.
- How to learn SDF
via point cloud denoising

There are many potential paths to achieve this, but only one path is the shortest to the surface. Then involving with SDF, make the denosing function find the shortest path
For an arbitrary point
where
Conclusion : EMD is the better distance metric for comparing nosiy point cloud

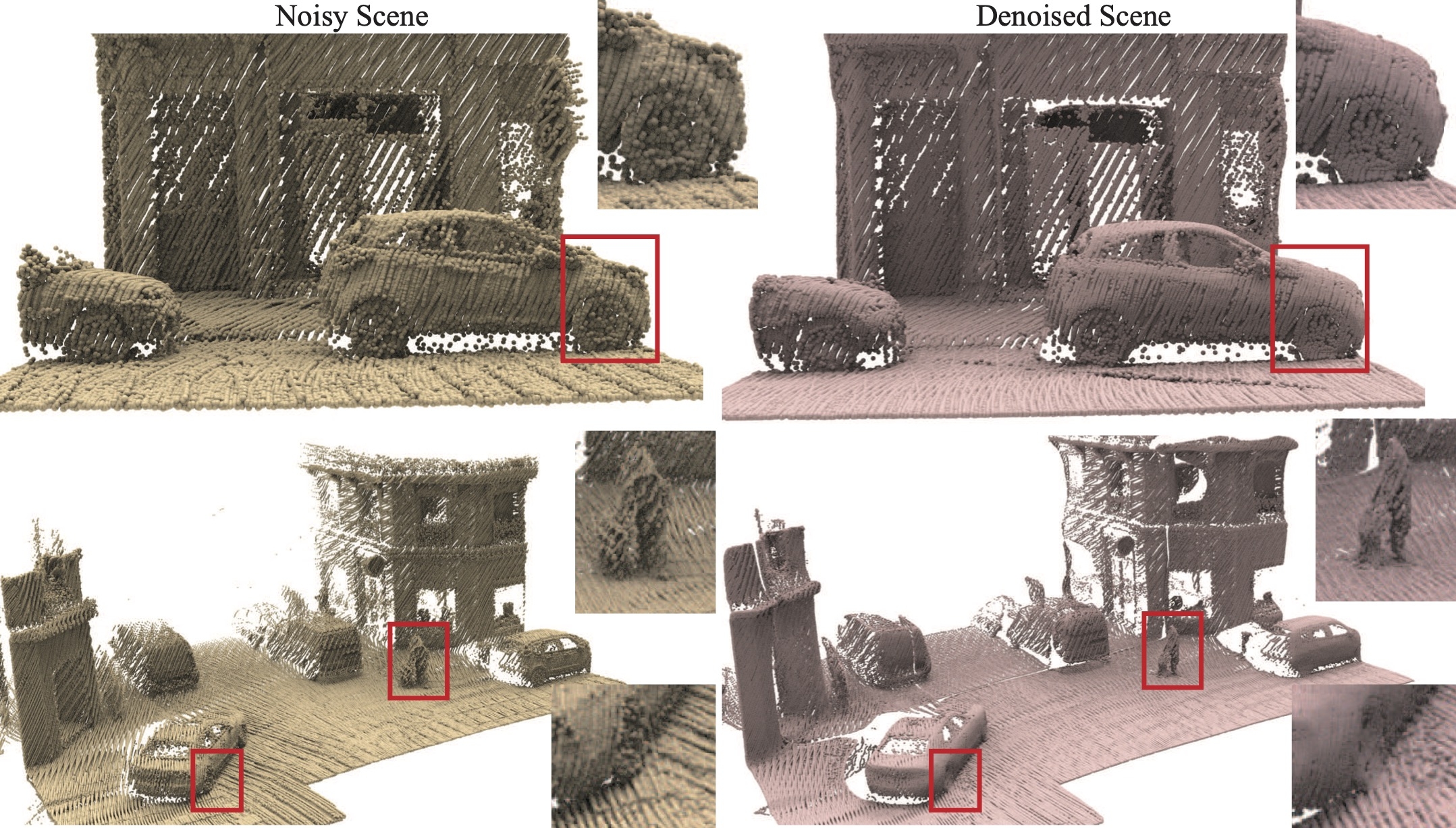
- (a) Nosiy Point Cloud
- (b) Denosing Point Cloud by CD
- (c) Denosing Point Cloud by EMD
- (d) Reconstructed Mesh by MatchingCubes algorithm according the learned SDF (CD) without Geometric Consistency
- (e) Reconstructed Mesh by MatchingCubes algorithm according the learned SDF (EMD) without Geometric Consistency
- (f) Denosing Point Cloud by EMD with Geometric Consistency
- (g) Reconstructed Mesh by MatchingCubes algorithm according the learned SDF (EMD) with Geometric Consistency
- (h) Ground truth
Refer (b) and (c),
for an arbitrary query
- Therefore,the absolute value
of the signed distance predicted at should equal to the minimum distance between and the denosied point cloud , Since the point density of may slightly affect the consistency, we leverage an inequality to describe the geometric consistency, -
where
- Comparing (c) and (f), with Geometric Consistency, the denoising Point Cloud are more uniformly distributed.
- Comparing (e) and (g), learn a correct SDF to reconstruct plausible surface.
Experiments

3 queries (black cubes) sampled from one noisy point cloud get pulled onto the surface
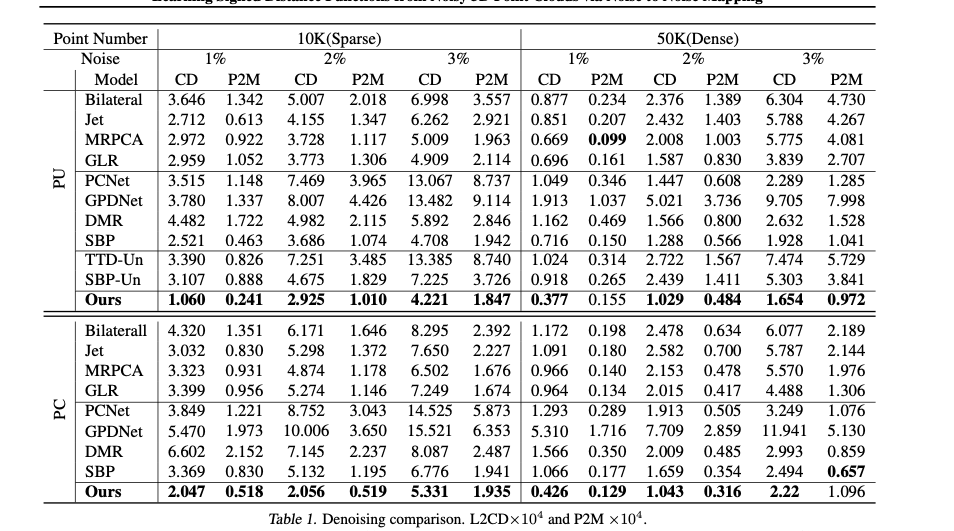
- Datasets: PU(PUNet) and PC(PointCleanNet)

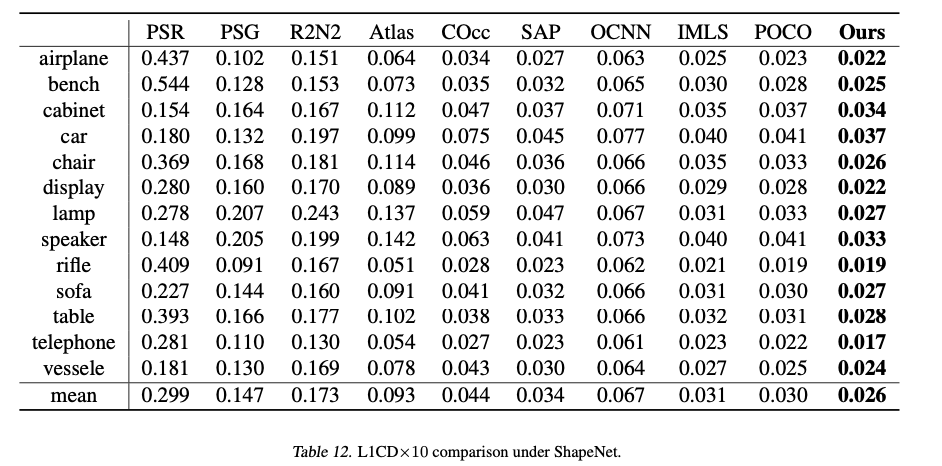
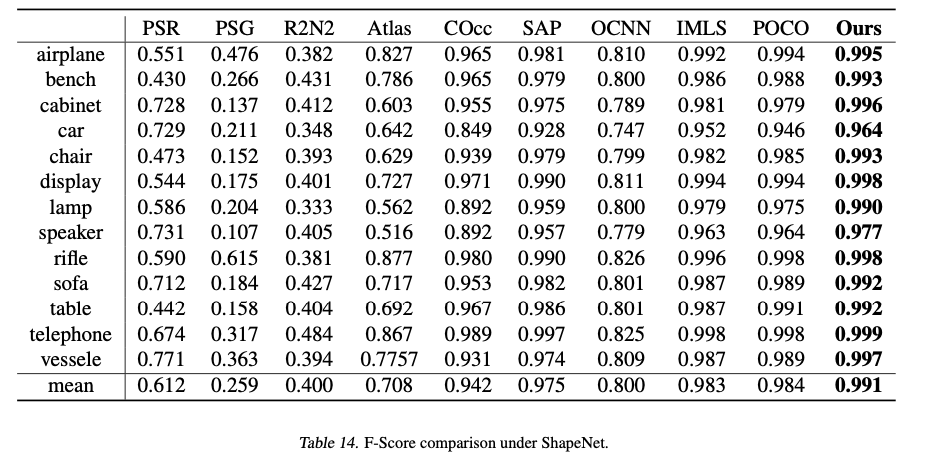
Datasets: ShapeNet


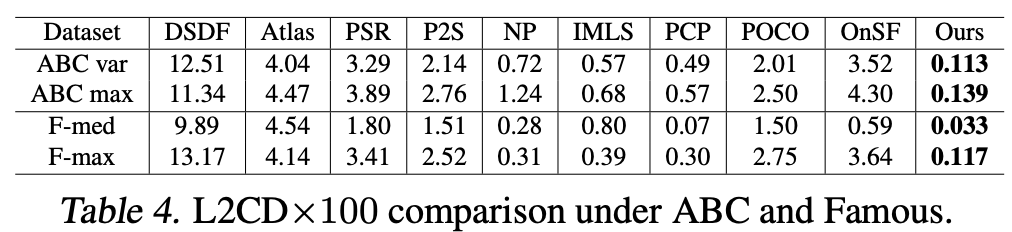
- Dataset: FAMOUS and ABC.
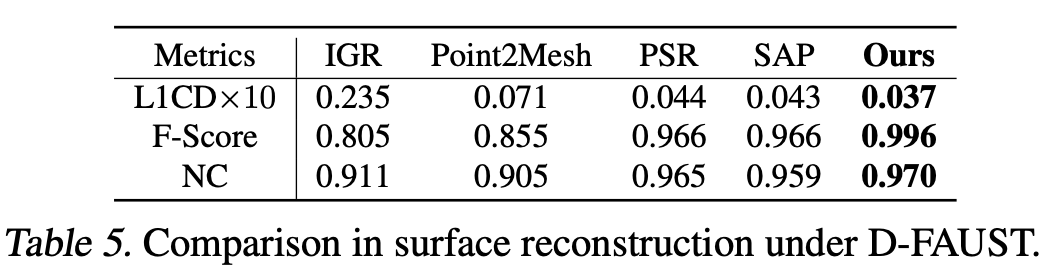
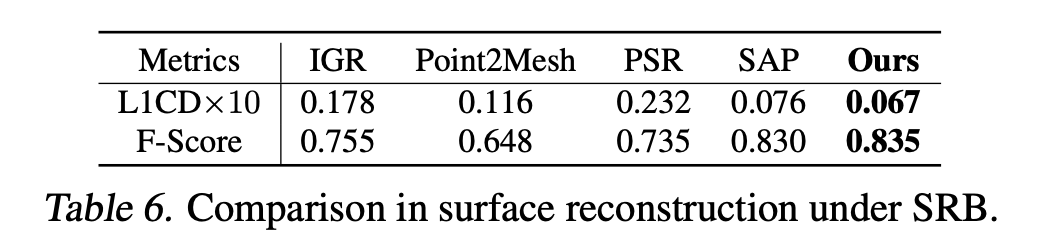
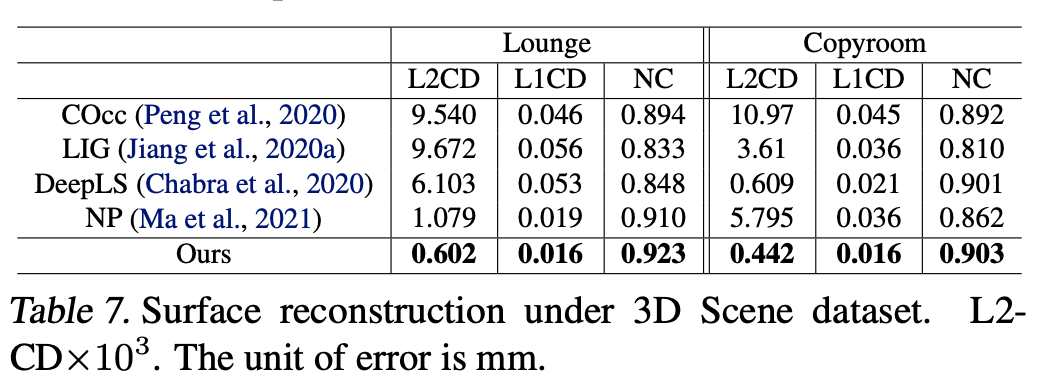
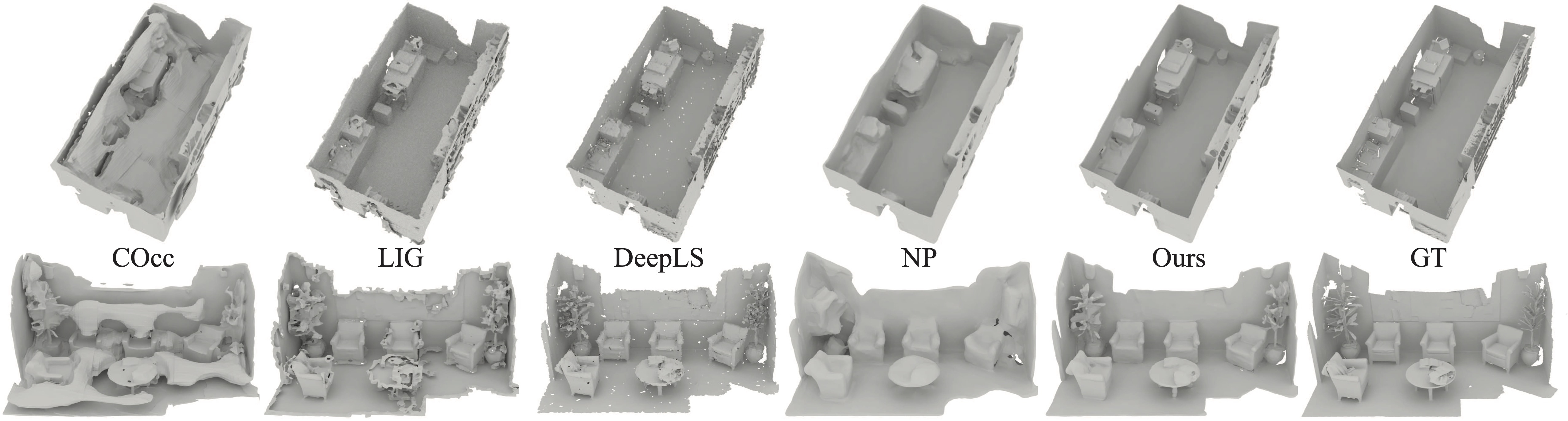
- Dataset: D-FAUST and SRB

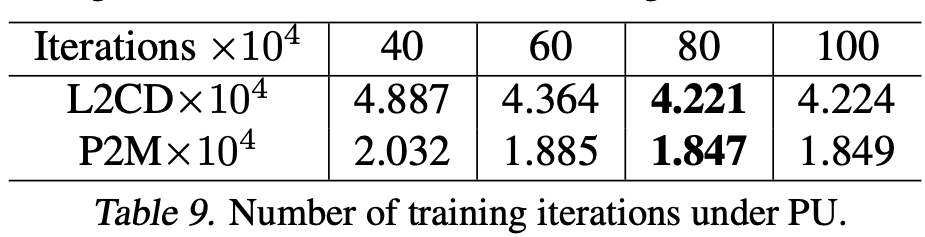
Ablation Study
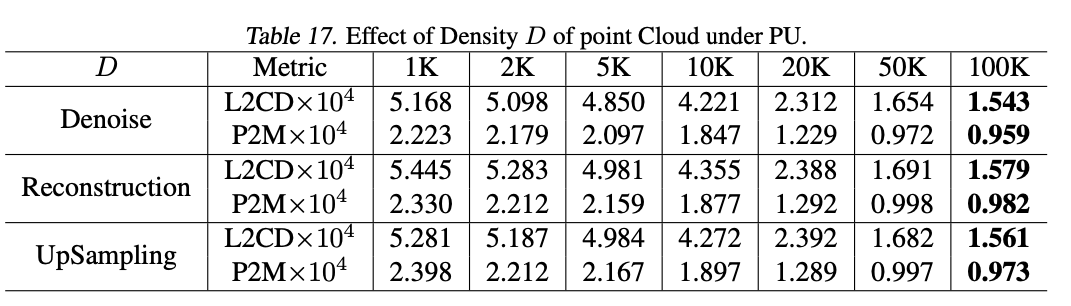
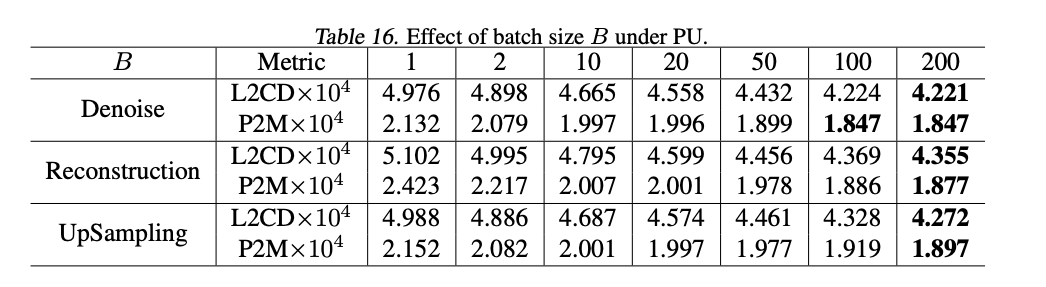
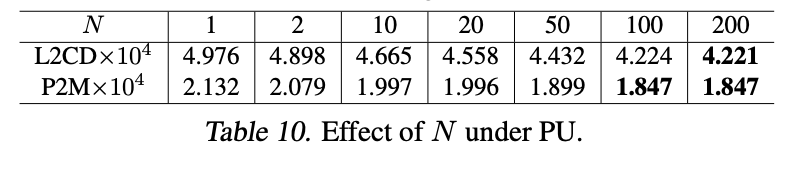
- More corrupted observations are the key to increase the performance of statistical reasoning although one corrupted observation is also fine to perform statistical reasoning well.